Jól alakul az év legizgalmasabb űreseménye
Fantáziarajz a Csurjumov–Geraszimenko-üstökös magja körül keringő Rosetta űrszondáról. A szonda a tervek szerint idén augusztustól 17 hónapon keresztül kering az üstökös magja körül
Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
A Rosetta az Európai Űrügynökség (ESA) űrszondája, amelyik 2004 óta úton van a Csurjumov–Geraszimenko-üstökös felé. Évtizedes utazása legfontosabb és legérdekesebb eseményeiről akkor számoltunk be, amikor még a szakemberek is csak 50% esélyt adtak annak, hogy egyáltalán felébreszthető lesz-e két és fél évig tartó „téli álmából”. A terv sikerült, a szonda január 20-án „bejelentkezett” – életre kelt. Azóta látszólag eseménytelen, de fontos hónapokon vagyunk túl.
A Rosetta augusztusban érkezik meg célpontjához. Ez lesz az űrkutatás történetében az első alkalom, amikor egy űrszonda nemcsak elrepül egy üstökös mellett, hanem pályára áll körülötte, hogy 17 hónapon keresztül közelről vizsgálja, miként válik az égitest magja a Nap felé közeledve egyre aktívabbá.
A Rosetta a keringés első szakaszában feltérképezi a magot, ahol alkalmas leszállóhelyet keres, majd novemberben megpróbál leszállóegységet (Philae) juttatni a felszínére. A leszállóegység tudományos műszereiből kettő (ROMAP és a SESAME) elkészítésében az MTA Energiatudományi Kutatóközpont (MTA EK) mérnökei is részt vettek.
Az ESA Rosetta blogja még május elején adta hírül, hogy a szonda 11 tudományos műszerét és a Philae leszállóegységet sikeresen bekapcsolták. A műszerek életre keltése, kipróbálása, beállítása hat hétig tartott. Néhány berendezésnél apróbb működési zavarokat tapasztaltak, volt, amelyiknél javított szoftvert kellett feltölteni, de a beállítási időszak végére minden eszközt működőképessé tudtak tenni. Ezután az eszközök többségét ismét kikapcsolták, csak az üstököst megfigyelő OSIRIS kamerát és a szonda navigációs kameráit hagyták bekapcsolva. Mire mindezzel végeztek, a szonda már csak 2 millió kilométerre volt célpontjától (a Rosetta januári ébresztésekor ez a távolság még 9 millió km, március végén kb. 5 millió km volt). Mire május közepére az ESA hivatalos bizottsága elfogadta a műszerek felélesztéséről szóló jelentést, a távolság 1,5 millió km-re csökkent.

Eközben az OSIRIS kamerával folyamatosan figyelték és fényképezték az üstököst, amely a Rosettáról nézve a Kígyótartó csillagképben, az M107 gömbhalmaz közelében látszik. Május elején már határozottan felismerhetővé vált az égitest magját körülvevő poros fátyol, amelynek átmérőjét a kutatók 1300 km-re becsülték (összehasonlításképpen: az üstökös magja csupán kb. 4 km átmérőjű). Ekkor az üstökös még mintegy 600 millió km-re (kb. 4 Nap–Föld-távolság) volt a Naptól, de felszíne már elkezdett melegedni, a gázok szublimálnak a testéből, számtalan porszemcsét sodorva magukkal. Az OSIRIS kamerát működtető kutatócsoport vezetője, Holger Sierks (Naprendszer-kutatási Max Planck Intézet, Németország) elmondta, „szinte hihetetlen, hogy néhány hónap múlva a Rosetta már ennek a gáz- és porfelhőnek a belsejében fog dolgozni”. A mérések alapján annyit máris megállapítottak, hogy az üstökös magja 12,4 óránként fordul meg a tengelye körül, ez 20 perccel rövidebb a korábban mértnél.

Májustól augusztusig a legfontosabb feladat, hogy a Rosettát minél pontosabban az üstökös közelébe vezessék. Ehhez eleinte kéthetenként, majd hetenként egy-egy pályamódosító manővert kell végrehajtani, hogy az augusztus 6-ára tervezett randevú sikeres legyen. Az első, május 7-i pályamódosítás még csak bemelegítés volt, ekkor a szonda üstököshöz képest mért sebességét csak 20 m/s-mal változtatták meg. Május 21-én viszont a hajtómű 7 óra 16 percen át működött, miközben 218 kg hajtóanyagot égetett el, hogy a sebesség 289,59 m/s-mal változzék. A pályamódosítások tervezett menetrendje és nagysága itt olvasható.
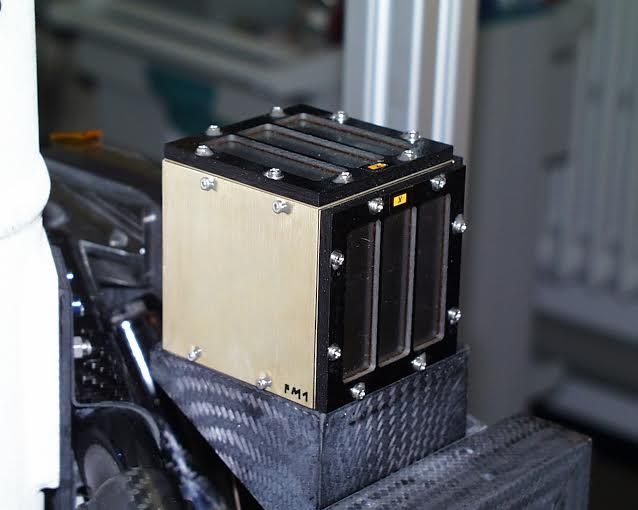
Mint Apáthy István (MTA EK) elmondta, a ROMAP műszeregyüttes egyik kísérlete az SPM töltöttrészecske-monitor, melynek nagyfeszültségű egységét az MTA EK-ban készítették. A magyar kutatók részt vettek továbbá az SPM érzékelő elektronikájának kifejlesztésében, a kísérlet kalibrálásában, installálásában és gondozásában, valamint a felbocsátásra való előkészítésében.
A DIM pordetektor a SESAME kísérletcsomag része. Feladata azoknak az üstökösfelszíni anyagrészecskéknek a vizsgálata, melyek a kiszabaduló gázok hatására időszakosan elhagyják a felszínt, de mivel a szökéshez nincs elegendő sebességük, ezért visszaesnek rá. A műszer beütés-érzékelőjét, az annak jelét feldolgozó áramköröket és az adatgyűjtést vezérlő szoftvert ugyancsak az MTA EK-ban fejlesztették ki.