Két láb a talajon, egy az űrben - meredek helyzetben a Philae

Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
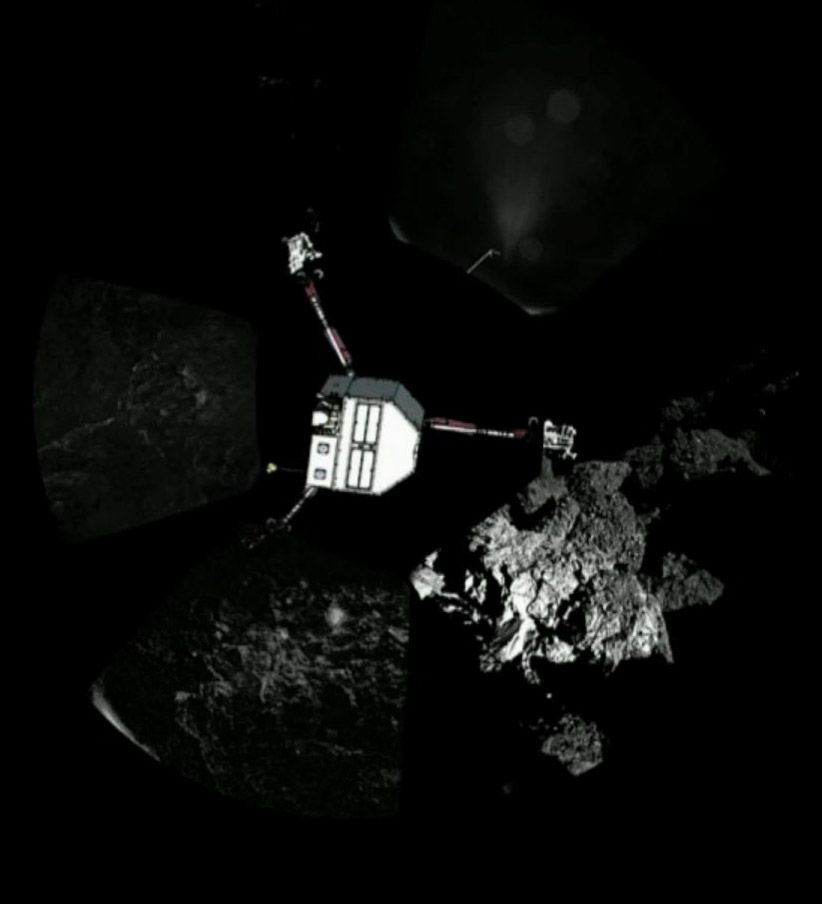
A Philae fedélzeti panorámakamera-rendszerétől (ÇIVA) már kaptunk egy két képből álló montázst, amely a leszállóegység lábát mutatta az üstökös egy sziklája mellett. A kora délutáni sajtótájékoztatón a többi kamera képeit is bemutatták, és amit láttunk, annak nem igazán örültünk. A képek elemzése alapján ugyanis kiderült, hogy a leszállóegység a felszínre csaknem merőlegesen áll - két lába a talajon nyugszik, egy pedig az űr felé mutat.
Az üstökösmag mágneses mezőjének mérésére hivatott ROMAP műszer segítségével nagyjából meg tudták határozni, mi is történt az első talajérintést követően. Tudjuk, hogy a a Philae a felszínt 1 m/s-os sebességgel érte el, majd amikor visszapattant, 38 cm/s-os sebességgel lökte el magát, és 1 óra 50 percig repült a felszín következő érintéséig. Ezután már csak egy igen gyenge, 3 cm/s-os kezdősebességű ugrást hajtott végre, 7 percig repült, és megállapodott a végső helyén. Ekkor állt le teljesen a forgása is.
Hogyan pattogott a Philae?
Ha nincs kéznél Öveges professzor, és szeretnénk megérteni, nagyjából mi történhetett, szerezzünk egy régi lemezjátszót, szórjuk be a korongját liszttel, indítsuk el, és ejtsünk rá egy squashlabdát - majd nézzük meg lisztet érés nyomait. A Philae alatt nem egy lemez, hanem az üstökösmag fordult el, így tehetett meg kilométeres távolságot is a felszínen.
A napelemek adatai azt mutatják, hogy a leszállóegység jóval árnyékosabb helyre kjerült annál, amivel eredetileg számoltak, így a 12 óránként várt 6-7 órás napsütés helyett csak 1,5 óra jut neki. Mivel a műszerek működéséhez az energiát főként a napelemekből nyeri, ezt is figyelembe kell majd venni a mérési program összeállításánál.
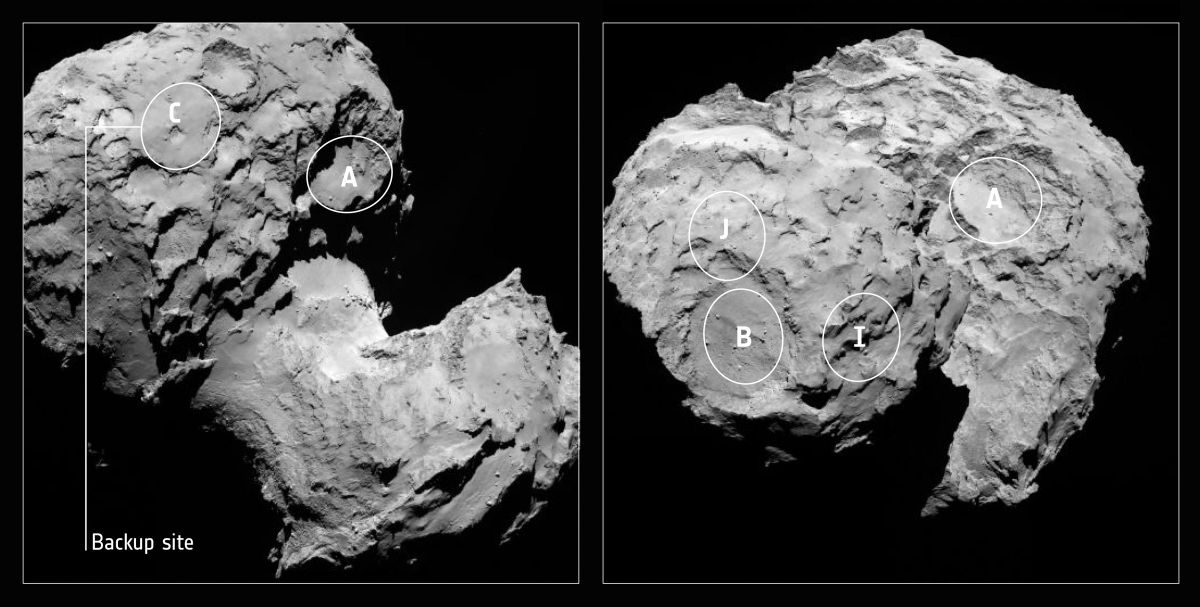
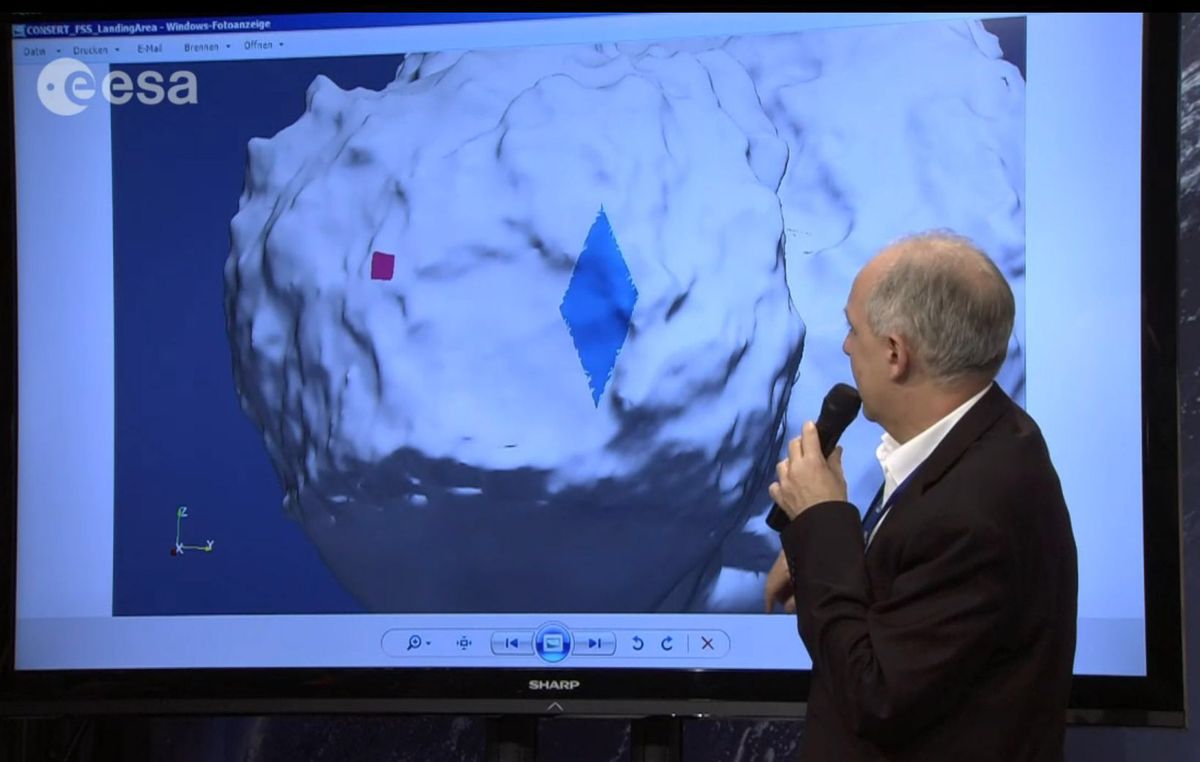
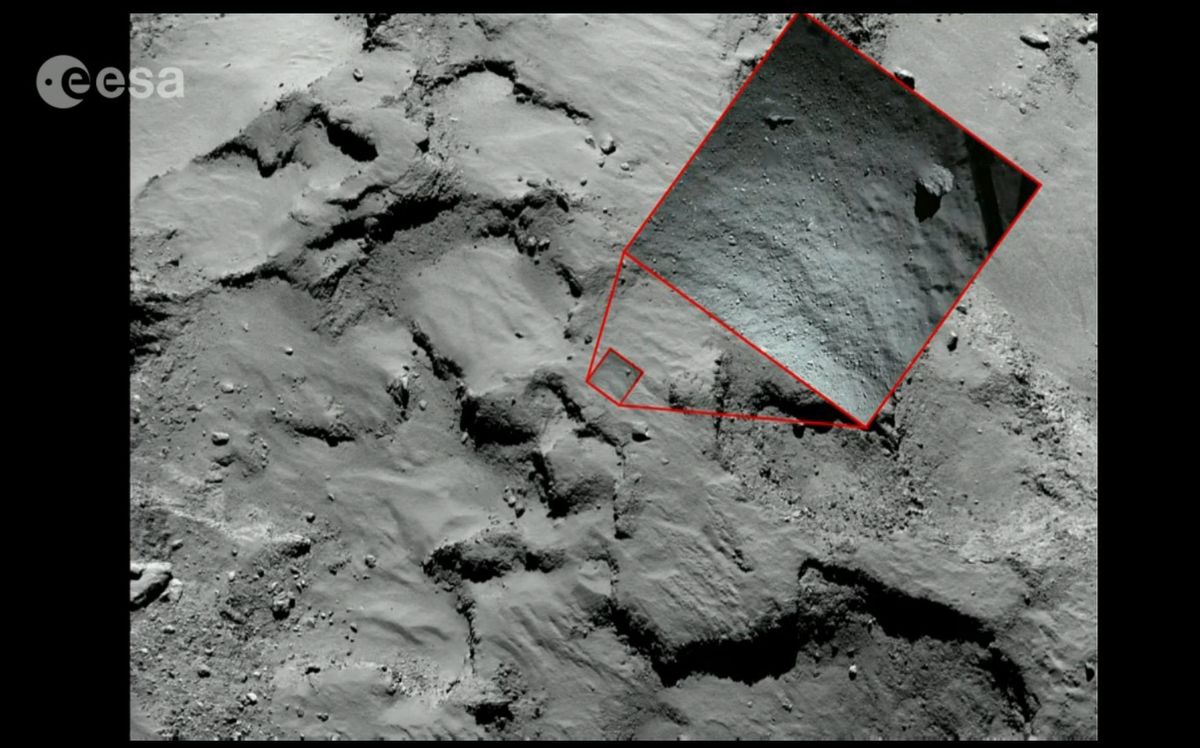
A Rosetta korábban alaposan körbefotózta a lehetséges leszállóhelyeket, így a fedélzeti ROLIS kamera leszállást megelőzően készített képe alapján igazolható, hogy a Philae először pontosan a tervezett helyen szállt le - igaz, utána továbbugrott jó egy kilométert. A Rosetta a leszállás óta is készített fotókat a felszínről, de egyelőre mélg nem tudták pontosan meghatározni a leszállóegység helyét.
Amég nem tudnak viszonylag biztos adatokat a Philae helyéről és helyzetéről, addig kockázatos minden olyan mérés, amelyhez mechanikai munkára van szükség, hiszen ezzel esetleg kibillenthetnék a leszállóegységet a helyéről. A SESAME, a ROMAP és a MUPUS rendszerek működnek, és amint láttuk, a ÇIVA és a ROLIS kamerarendszer is. A ROLIS kamera leszállás előtt fél perccel készített képe alapján látható, hogy az üstökösmag felszínét takaró por mozgásban van, elemzik, hogy mi okozhatja a talajon megjelenő mintázatokat.
Az első leszállási hely pontosan ismert, a következő feladat a Philae jelenlegi helyének felkutatása, és a kutatási program újratervezése a megváltozott körülmények figyelembe vételével.
Németh Zoltán, a Wigner Fizikai Kutatóközpont űrfizikai és űrtechnikai osztályának tudományos főmunkatársa az Origónak elmondta, hogy a Philae akkumulátorai teljes sötétben is képesek nagyjából 60 óráig biztosítani a leszállóegység áramellátását, így még kevesebb napfény mellett is rengeteg mérés elvégezhető. Mivel a leszállóegység energiaellátó rendszerét magyar mérnökök tervezték, számukra különösen izgalmasak lesznek a következő napok, hiszen a mérések prioritási sorrendjének felállításához, a Philae esetleges talpra állítási kísérleteihez pontosan tudni kell az egyes feladatok energiaigényét.
Németh szerint azonban egyelőre még a mechanikus műveletek nélkül is bőven van mit mérnie a leszállóegységnek, és óráról órára olyan új információkkal gazdagodunk, melyeket majd a legelőkelőbb tudományos szaklapokban látunk viszont. Így az irányítóközpont munkatársai jelenleg óvakodnak attól, hogy a legkisebb mértékben is megmozdítsák a Philae-t.











