Robotvakond vájkál a Marson
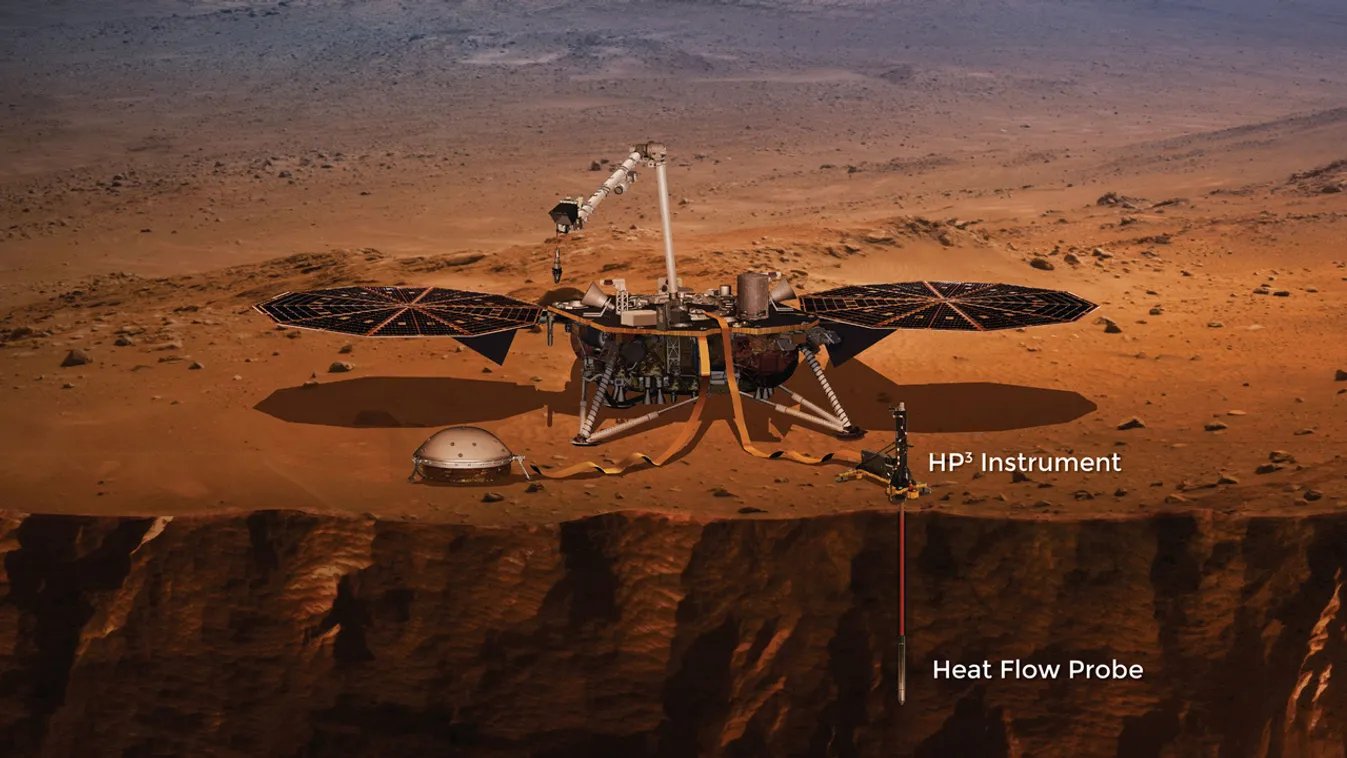
A HP3 (Heat Flow and Physical Properties Probe) robotvakond művészi illusztrációja
Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
Első, négy órán át tartó művelete során a robotvakond 4000 kalapácsütést ejtett és 30 centiméter mélyre jutott a vörös bolygó talajában és hónapok óta nem jut tovább.
"Valószínűleg nem megfelelő a robotvakond támasztéka a környező talajban, a Mars csekélyebb gravitációjának hatása alatt" - közölte a Német Űrkutató Központ (DLR). Hozzátették, hogy egy kő is megállíthatta, de ez valószerűtlen.
A robotvakond az amerikai űrkutatási hivatal (NASA) Insight-missziója keretében érkezett a vörös bolygóra novemberben és február végén kezdett fúrni a Mars talajában.

A DLR a NASA-val együttműködve azt tervezi, hogy az Insight szonda robotkarjával megpróbálják felemelni a robotvakond támasztószerkezetét. Ezzel egyrészt közelebbről megvizsgálhatják a helyzetét, másrészt így a további kalapálás során közvetlenül a robotkarral is megtámaszthatnák a robotvakondot.
A hőáramlást mérő HP3 (Heat Flow and Physical Properties Probe) műszerrel végzett kutatás célja, hogy mérjék a Mars belsejéből érkező melegáramlatokat.
A DLR fejlesztette berendezés "tüskéje" kalapácsszerű ütésekkel halad előre a talajban, miközben mérőszenzorokkal ellátott kábelt húz maga után.

Az eredeti tervek szerint a távirányítású berendezés az űrkutatás történelmében először öt méter mélyre hatol a Mars talajában, amelynek hőmérsékletét és hővezető képességét vizsgálja. Az adatok a Földhöz hasonlatos égitest keletkezésének és fejlődésének jobb megértéséhez járulhatnak hozzá.
A HP3 a hőmérsékletet a Celsius-fok egy ezredrészének megfelelő pontossággal tudja mérni. Ebből például arra is lehet következtetni, hogyan fejlődött a vörös bolygó belseje és hogy még mindig rendelkezik-e forró, folyékony belső maggal.
Az Insight november 26-án landolt a Marson, az Elízium-síkságnak egy sekély, porral és homokkal teli kráterében. A 360 kilogrammos robotgeológus nem mozog, leszállási helyén végzi feladatait.
Az összesen 650 millió eurós (208,8 milliárd forint) misszió a tervek szerint két éven át tart.












