Soha nem látott rúgással kezdődik a focivébé
Ha minden a terveknek megfelelően alakul, a "külső csontváz" hamarosan felválthatja a kerekesszéket
Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
Különböző kutatócsoportok évtizedek óta próbálkoznak úgynevezett agy-gép interfész (brain-machine interfaces, BMI) eszközök létrehozásával. A cél az, hogy a készülék érzékelje a felhasználó szándékát (gondolatait), és továbbítsa valamilyen végrehajtó berendezés (például művégtag) felé.
A Járj újra program (Walk Again Project) keretében Miguel Nicolelis idegtudós (Duke Egyetem) és munkatársai ezt a BMI-technológiát mesterséges külső vázra, úgynevezett exoszkeletonra alkalmazták. A külső váz érzékeli a páciens agyának elektromos aktivitását, ez alapján pedig felismeri a használó szándékát – például azt, hogy lépni akar egyet, vagy a labdát elrúgni –, és elvégzi a kívánt tevékenységet.

A "külső csontváz" látványos bemutatkozására csütörtökön este kerülhet sor. Az elmúlt hónapokban nyolc deréktól lefelé lebénult, húsz és negyven év közötti brazil fiatalt igyekeztek megtanítani a használatára. Ha minden jól alakul, akkor egyikük június 12-én, magyar idő szerint este 10 órakor elvégzi a kezdőrúgást a Brazíliában rendezett 2014-es labdarúgó-világbajnokság nyitómérkőzésén.
A találmány ötletét egy 2008-as állatkísérlet inspirálta. Nicolelis egy két lábon való járásra tanított majmot sétáltatott egy futópadon Észak-Karolinában. Ezzel párhuzamosan Kiotóban japán kutatók ugyanezt tették egy emberszerű robottal, amely az Idoya névre hallgató majom agya által küldött jelzéseket használta fel a mozgássorozat végrehajtásához.

Ez úgy vált lehetségessé, hogy elektródákat építettek a majom agyának azon területeire, amelyek az állat lábainak mozgásáért felelősek. Ezek az elektródák képesek érzékelni és rögzíteni annak a 250-300 idegsejtnek az aktivitását, amelyek az állat járása során lépnek működésbe. Egyes neuronok akkor "tüzeltek", amikor a főemlős rákészült a mozgásra, más idegsejtek akkor, amikor a csípő, a térd és a boka ténylegesen megmozdult. Szintén különálló neuronok váltak aktívvá akkor, amikor a majom lába a földet érintette. Az állat mozgását nagy sebességű kamerával is rögzítették. Az így kapott különböző adatokat végül egy egységes, számítógépek által olvasható formátumba helyezték. A robot az adatok ismeretében olyan pontosan leutánozta a majom mozgását, hogy még a tempóban sem volt tapasztalható eltérés.
A majomkísérlet tapasztalatainak nagy jelentősége volt az emberre tervezett exoszkeleton megalkotása során, van azonban egy igen jelentős különbség.
Idoya esetében az agyi jelekhez úgynevezett invazív eszközökkel fértek hozzá. Ez azt jelenti, hogy a jelfelvevő elektródákat közvetlenül az agyba építették. Az elektrokortikogram (agykérgi elektromos jelfelvétel, EcoG) elkészítéséhez az elektródákat sebészi úton az agyhártya külső rétege alá juttatták. (Lehetőség van arra is, hogy apróbb mikroelektródákat az agy állományába ültessenek. Ebben az esetben az idegsejtek egészen kis csoportjának működése válik követhetővé.)

Az emberi használatra tervezett mesterséges robotváz az adatokat egy elektródákkal ellátott sisakon keresztül fogja megkapni. Ennek a nem invazív technológiának a legismertebb példája az elektroenkefalográfia (EEG). Az EEG az agyi elektromos aktivitást a fejbőr felszínén – a fejre helyezhető, elektródákat tartalmazó sisak segítségével – keresztül észleli. Az így felvett jel nem olyan pontos, mint az agyba ültetett elektródák esetében, de a kutatók szerint a felhasználó így is képes lesz egyszerűbb parancsokkal (indulj el!/állj!) vezérelni az exoszkeletont.
Az új exoszkeleton képessége nem merül ki a különböző mozgáskombinációk végrehajtásában, ugyanis természetes tapintási érzetet is nyújt a sérült emberek számára. Ehhez a kutatók egy speciális mesterséges bőrt fejlesztettek ki, amelyet "CellularSkin" névre kereszteltek el. A természetes tapintásérzetet lehetővé tevő technológiát Gordon Cheng, a Müncheni Egyetem kutatója dolgozta ki.
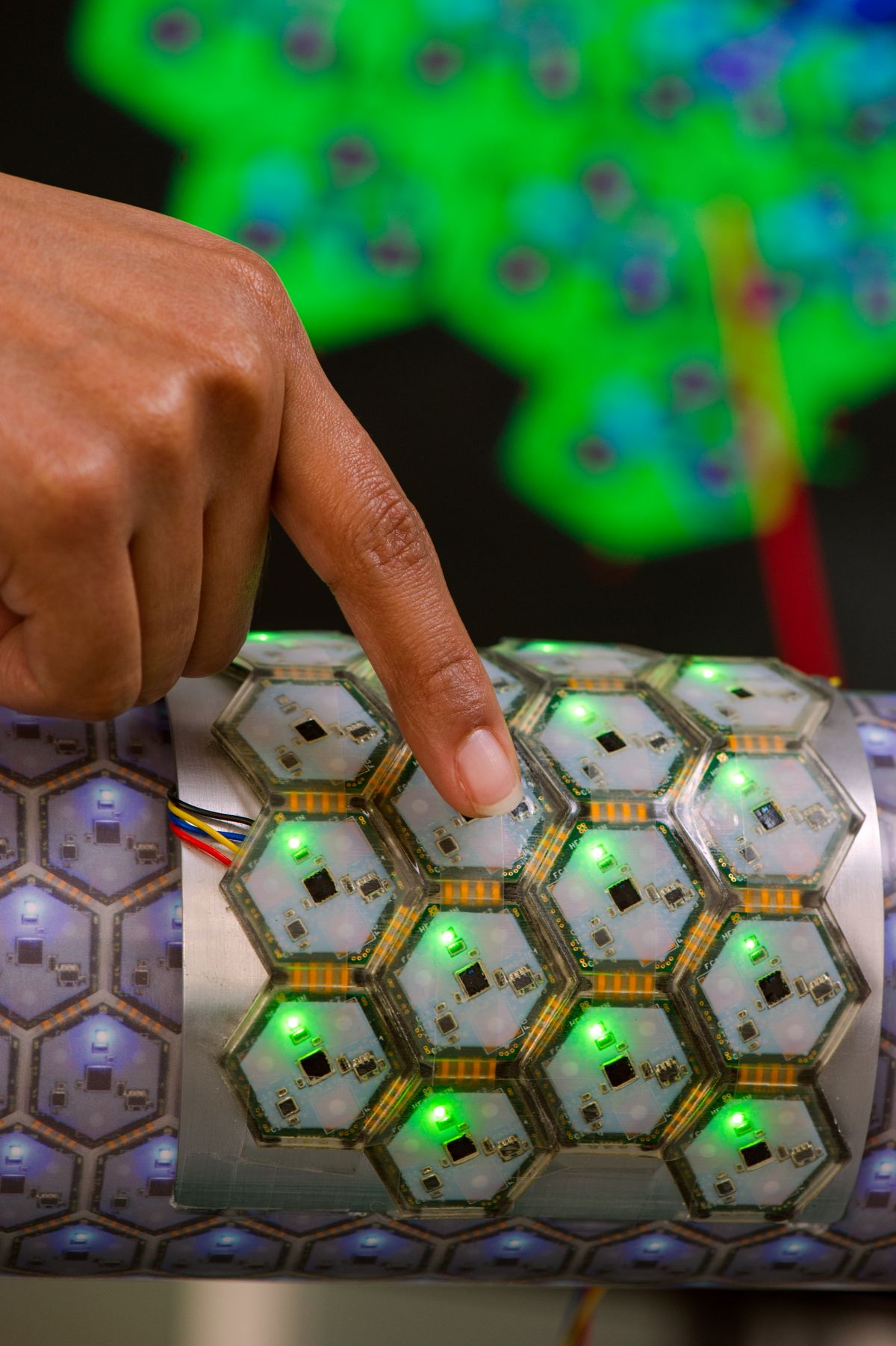
A CellularSkin több egységből épül fel. Egy-egy különálló egység egy hatszög alakú, lapos, elektromos alkatrészekből álló csomag, amely alacsony fogyasztású mikroprocesszort és érzékeny szenzorokat tartalmaz. A szenzorok képesek háromdimenziós térben érzékelni többek között a nyomást, a hőmérsékletet, a rezgést és a mozgást. Ezeket a különálló egységeket méhkaptár alakban összekapcsolják, gumibőrrel befedik, majd a külső váz talpába helyezik.
Amikor a robotláb földet ér, a mesterséges bőr jeleket közvetít a páciens karjára szerelt motorok felé, amik ennek hatására rezegni kezdenek. Ez a folytonos, közvetett visszajelzés aztán idővel lehetővé teszi, hogy a beteg a mesterséges lábakat beépítse a saját testtudatába.












